

- 座椅点焊应用
- 系统集成特点
- 交钥匙工程承接:可根据用户提供的产品,合理分配工艺流程、设计最适合的工艺分配方案和系统布置方案。
- 机器人- 点焊用途
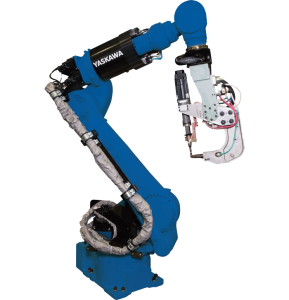
SP210
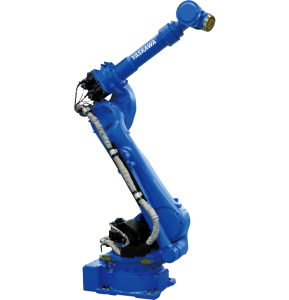
SP165

【系统集成特点】
面向产品:靠背、钢丝骨架、坐盆等
交钥匙工程承接:可根据用户提供的产品,合理分配工艺流程、设计最适合的工艺分配方案和系统布置方案。
夹具制造:安川首钢凭借多年的设计经验和出色的设计团队,逐步形成了一整套对应各种座椅部件的点焊夹具设计模式,在靠背和钢丝骨架点焊夹具设计更是积累了丰富的设计经验和技术诀窍。
系统采用安川最适合点焊的机器人SP165/SP210,配备安川式样的内置管线包。
安川点焊机器人既可用于气动点焊、也可用于伺服点焊。
用于伺服点焊时,安川机器人控制柜内可以提供焊钳电机驱动的外部轴单元,可以支持1.5KW/2.0KW/2.5KW等几种功率的电机规格。
点焊控制器通讯方式:可实现DeviceNet、ProfiNet及IO通讯等多种方式的连接。
安川首钢有专门的仿真团队负责点焊钳的模拟仿真、离线示教等工作,指导夹具设计,大大提高点焊机器人系统集成及调试的效率。
【工作站布置方案】
YSR标准工作站:SpotCell -TV、SpotCell –N
用户定制工作站:可根据客户需要制定用户标准的工作站。
【变位机】
YSR标准变位机:单轴变位机SH系列、水平三轴回转型变位机TV系列
用户定制变位机:接受允许条件下的特别研发制造。
【系统控制】
采用普通PLC或安全PLC作为系统控制器,集功能性、安全性于一体。
通讯方式:CC-Link、ProfiBus、ProfiNet、DeviceNet、EtherNet/IP等常见总线通讯。
系统安全设备:安全锁、光栅、区域传感器等多种安全装置
【机器人相关功能选项】
机器人安全功能:通过安全功能基板,可对机器人及外部轴的动作区域和速度进行监视,达到安全装置的级别。
发布日期: 2023-05-09