



搬运机器人SDCXRB-03A1/RB06-900/RB08/RB08A3-1490/RB08A3-1700/RB08A3-1840/RB10/RB20/RB50/RB130/RB165/RB210
产品参数
|
型号 |
自由度 |
驱动方式 |
有效负载 (kg) |
重复定位精度 (mm) |
运动范围 (°) |
最大速度 (°/s) |
允许最大扭矩
(N. m) |
运动半径 (mm) |
本体重量 (kg) |
|||||||||||||
|
J1 |
J2 |
J3 |
J4 |
J5 |
J6 |
J1 |
J2 |
J3 |
J4 |
J5 |
J6 |
J4 |
J5 |
J6 |
||||||||
|
RB03A1 |
6 |
交流伺服驱动 |
3 |
±0.02 |
±150 |
+136~-51 |
+64~-131 |
±150 |
±120 |
±360 |
375 |
375 |
419 |
600 |
600 |
750 |
9.3 |
9.3 |
4.5 |
562 |
36 |
|
|
RB06-900 |
6 |
交流伺服驱动 |
6 |
±0.03 |
±170 |
+135~100 |
+155~110 |
±170 |
±120 |
±360 |
337.5 |
270 |
375 |
300 |
375 |
468 |
12 |
10 |
6 |
900 |
60 |
|
|
RB08 |
6 |
交流伺服驱动 |
8 |
±0.05 |
±170 |
+120~-85 |
+75~-155 |
±180 |
±135 |
±360 |
154 |
154 |
154 |
420 |
252 |
620 |
14 |
12 |
7 |
1389 |
180 |
|
|
RB08A3-1490 |
6 |
交流伺服驱动 |
8 |
±0.05 |
±170 |
+120~-85 |
+83~-150 |
±180 |
±135 |
±360 |
200 |
200 |
200 |
400 |
356 |
600 |
14 |
12 |
7 |
1490 |
185 |
|
|
RB08A3-1700 |
6 |
交流伺服驱动 |
8 |
±0.05 |
±170 |
+120~-85 |
+83~-150 |
±180 |
±135 |
±360 |
180 |
180 |
180 |
400 |
356 |
600 |
14 |
12 |
7 |
1700 |
187 |
|
|
RB08A3-1840 |
6 |
交流伺服驱动 |
6 |
±0.05 |
±170 |
+120~-85 |
+83~-150 |
±180 |
±135 |
±360 |
160 |
160 |
160 |
400 |
356 |
600 |
14 |
12 |
7 |
1840 |
180 |
|
|
RB10 |
6 |
交流伺服驱动 |
10 |
±0.05 |
±170 |
+150~-85 |
+85~-170 |
±360 |
±120 |
±360 |
200 |
160 |
200 |
360 |
360 |
600 |
43.2 |
43.2 |
25.4 |
1550 |
240 |
|
|
RB20 系列 |
RB06-2060 |
6 |
交流伺服驱动 |
6 |
±0.05 |
±170 |
+145~-100 |
+75~-165 |
±180 |
±135 |
±360 |
165 |
165 |
170 |
300 |
356 |
600 |
40 |
12 |
7 |
2060 |
285 |
|
RB15L |
6 |
交流伺服驱动 |
15 |
±0.05 |
±170 |
+145~-100 |
+75~-165 |
±180 |
±133 |
±360 |
165 |
165 |
170 |
300 |
198 |
394 |
40 |
50 |
22 |
1794 |
300 |
|
|
RB20 |
6 |
交流伺服驱动 |
20 |
±0.05 |
±170 |
+132~-95 |
+73~-163 |
±180 |
±133 |
±360 |
165 |
165 |
170 |
300 |
198 |
394 |
40 |
50 |
22 |
1595 |
290 |
|
|
RB50 |
6 |
交流伺服驱动 |
50 |
±0.05 |
±178 |
+130~-90 |
+75~-200 |
±360 |
±115 |
±360 |
171 |
171 |
171 |
215 |
251 |
365 |
196 |
196 |
127 |
1956 |
600 |
|
|
RB130 |
6 |
交流伺服驱动 |
130 |
±0.20 |
±175 |
+75~-60 |
+80~-185 |
±360 |
±115 |
±360 |
100 |
94 |
104 |
165 |
174 |
238 |
951 |
951 |
490 |
2715 |
1420 |
|
|
RB165 |
6 |
交流伺服驱动 |
165 |
±0.20 |
±175 |
+75~-60 |
+80~-185 |
±360 |
±115 |
±360 |
100 |
94 |
104 |
152 |
160 |
220 |
951 |
951 |
490 |
2463 |
1400 |
|
|
RB210 |
6 |
交流伺服驱动 |
210 |
±0.20 |
±175 |
+75~-60 |
+80~-185 |
±360 |
±115 |
±360 |
100 |
94 |
104 |
144 |
118 |
200 |
1274 |
1274 |
686 |
2463 |
1430 |
|
|
RB300 |
6 |
交流伺服驱动 |
300 |
±0.20 |
±175 |
±55 |
+116~-85 |
±360 |
±115 |
±360 |
85 |
95 |
95 |
120 |
120 |
180 |
1274 |
1274 |
686 |
2508 |
1500 |
|
避免与易燃易爆炸及腐蚀性气体、液体接触;勿溅水、油、粉尘;远离电器噪声源(等离子)
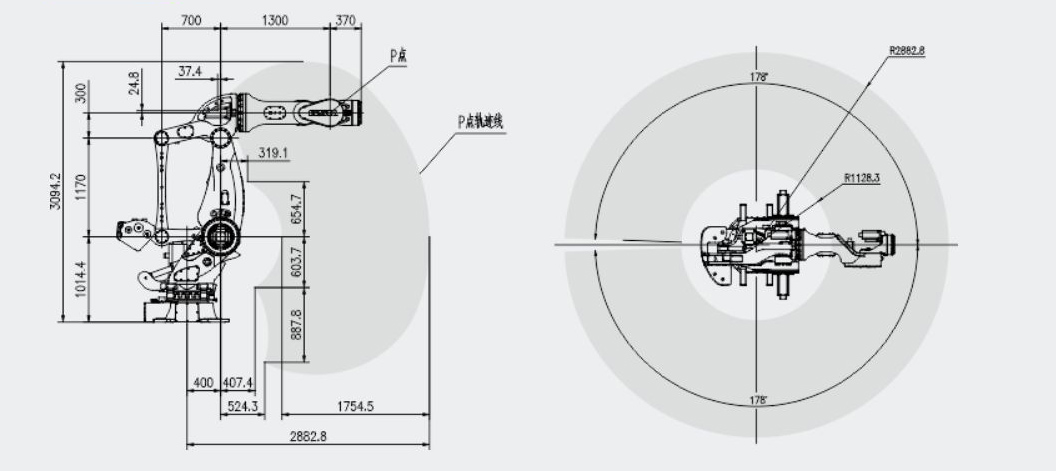
运动范围
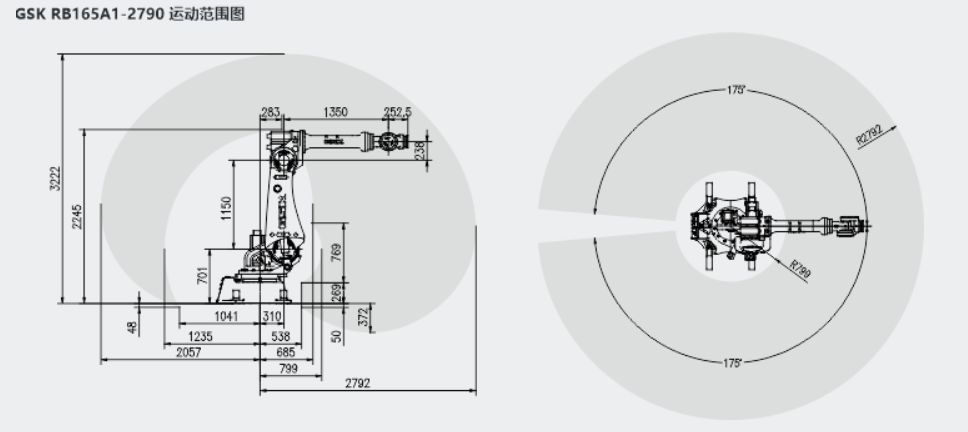
RB165-2790运动范围图
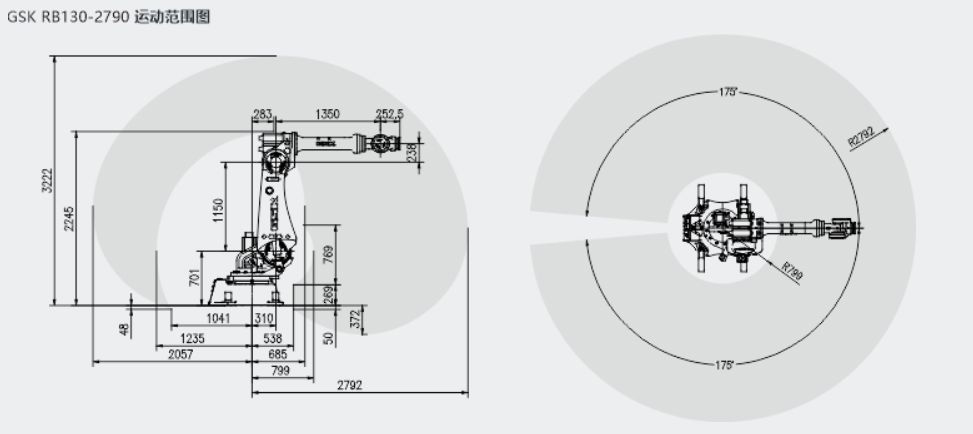
RB130-2790运动范围图
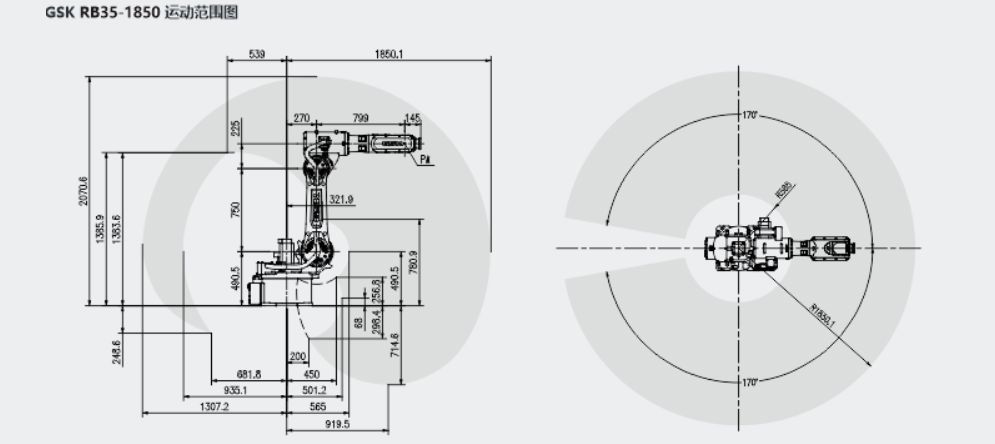
RB35-1850运动范围图
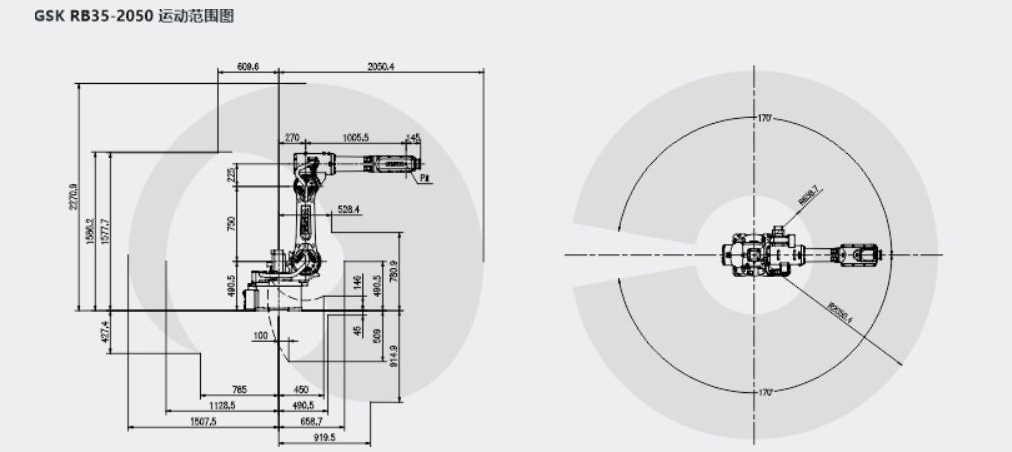
RB35-2050运动范围图
RB500运动范围图
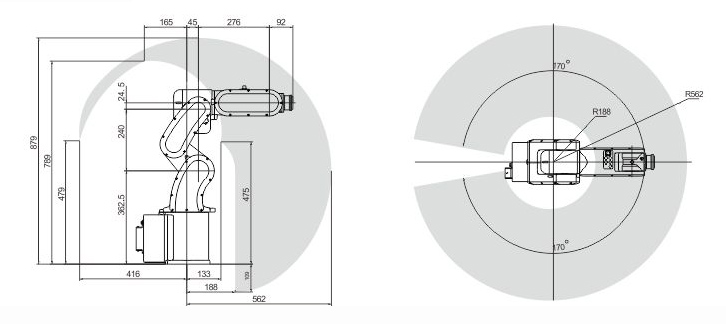
RB03A1运动范围图
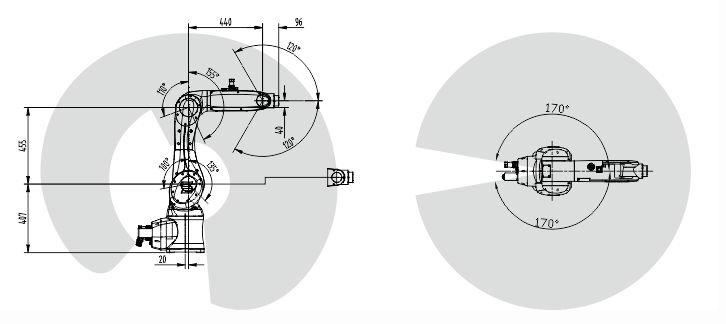
RB06-900运动范围图
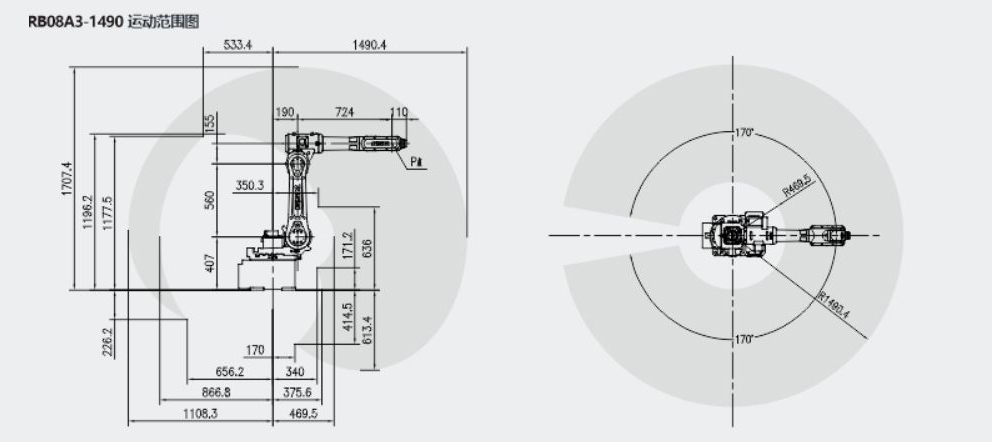
RB08A3-1490运动范围图
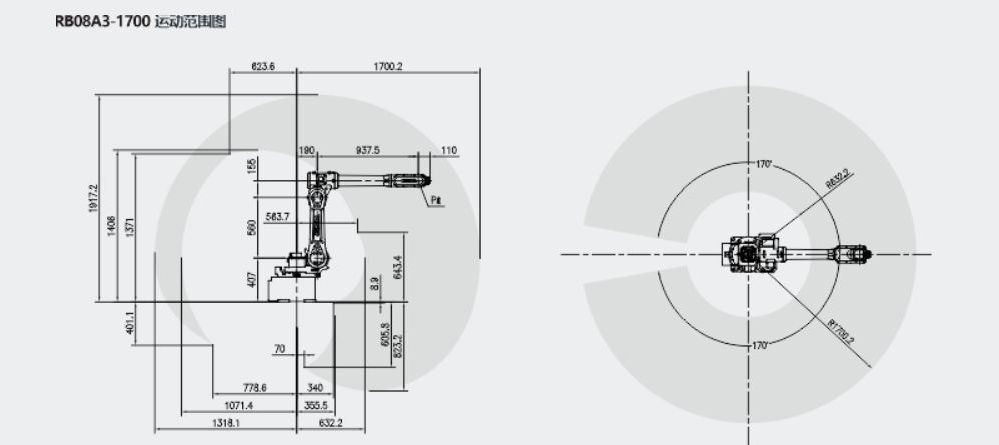
RB08A3-1700运动范围图
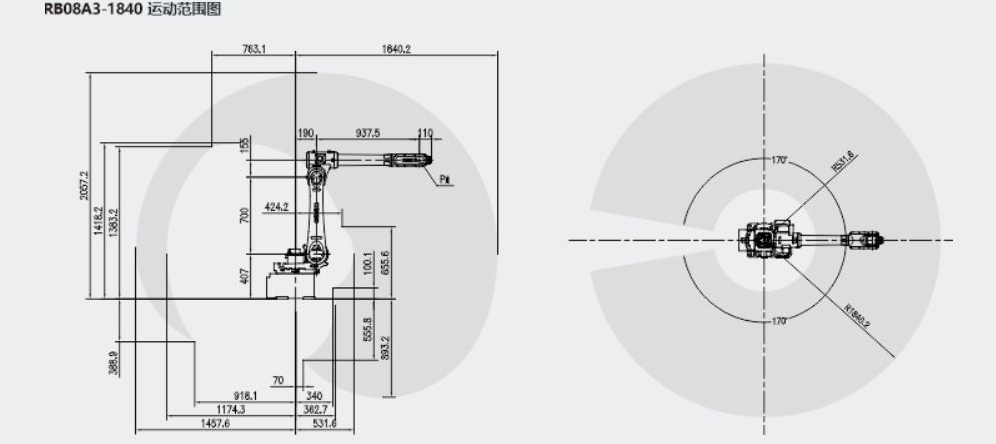
RB08A3-1840运动范围图
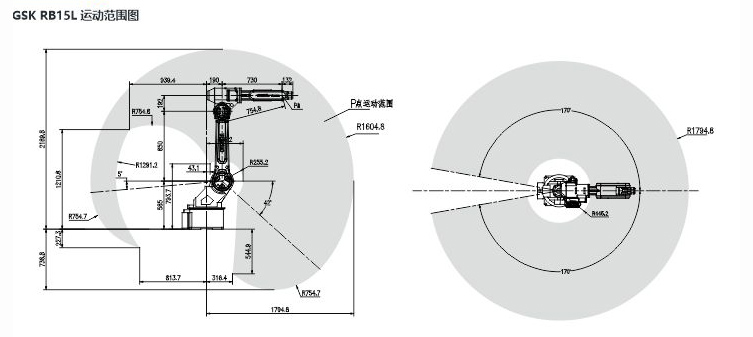
RB15L运动范围图
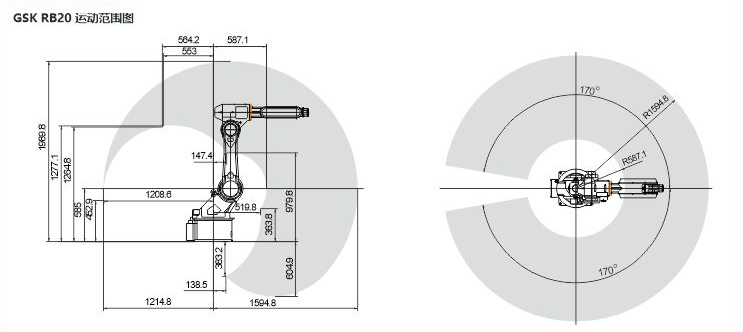
RB20运动范围图
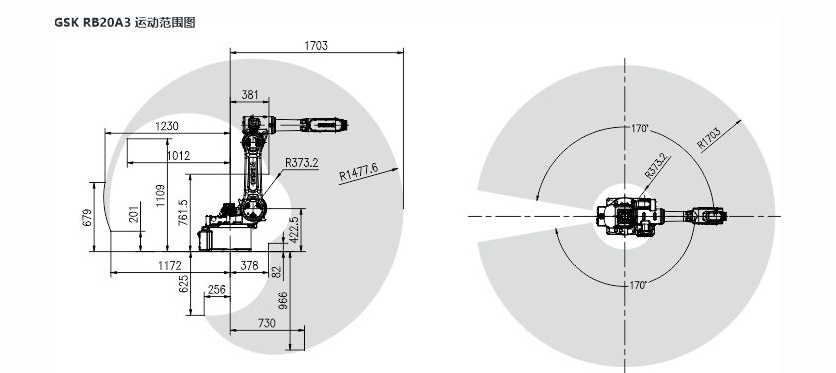
RB20A3运动范围图
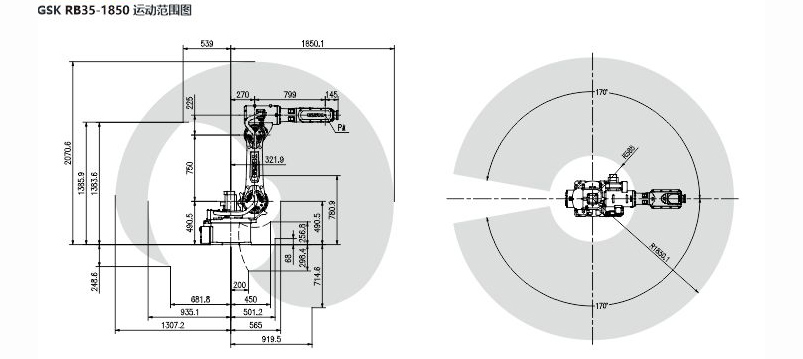
RB35-1850运动范围图
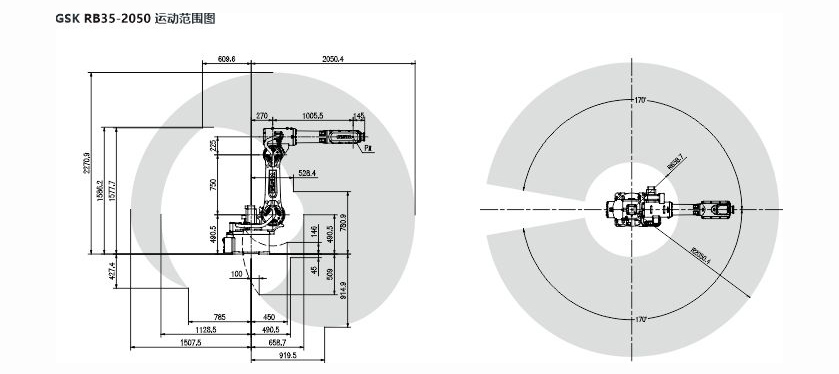
RB35-2050运动范围图
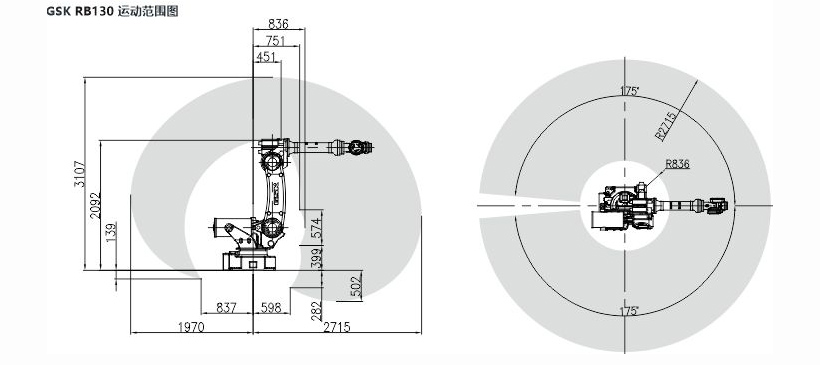
RB130运动范围图

RB165A1运动范围图
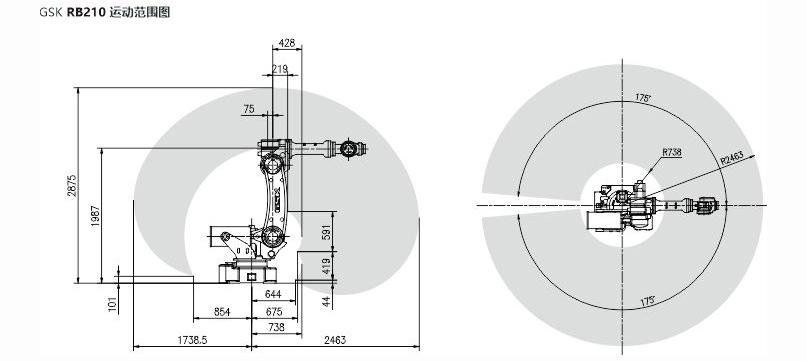
RB210运动范围图
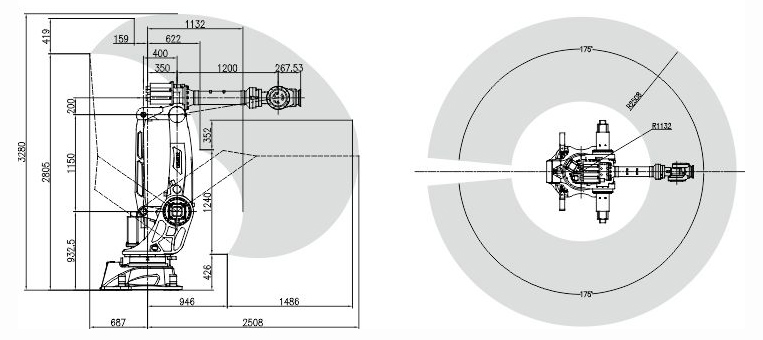
RB300运动范围图
产品应用展示:
Solutions

Technical scheme of Tank Blanking and Handling Project






